Version Voltron
Lecture: Projekt Hannah
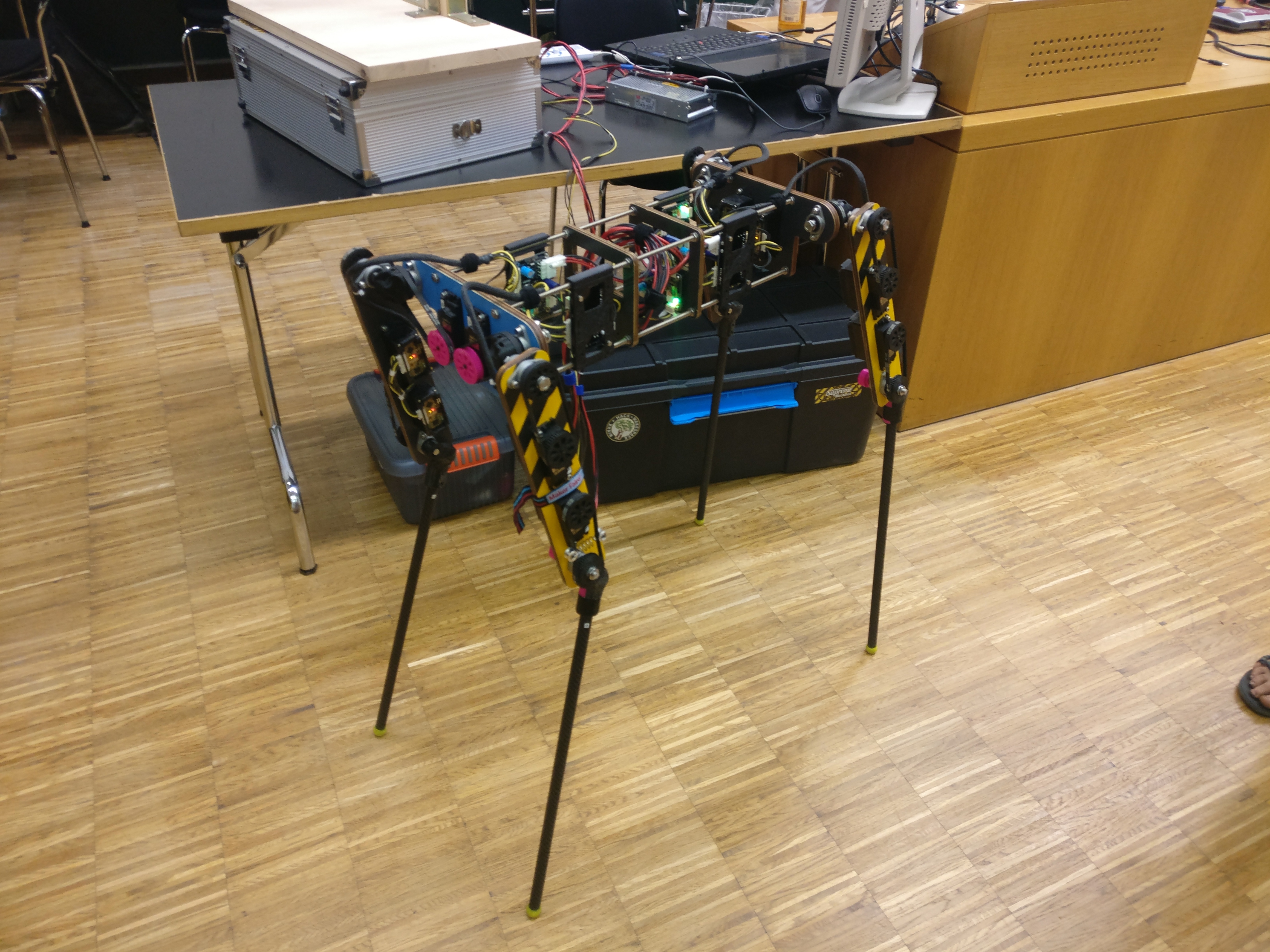
Ein open-source Hardware- und Software-Design für vierbeinige Laufroboter

Um das Entwickeln von eigenen Laufrobotern zu erleichtern, brauchen wir offene Alternativen zu bestehenden Plattformen. Am Beispiel unseres Projektes "Hannah" stellen wir euch Möglichkeiten vor, wie Open Source in Robotik-Hardware praktisch eingesetzt werden kann.
Wir bauen einen vierbeinigen Laufroboter, der vollständig open-source in Hard- und Software ist, denn Roboter werden für uns alle sicherer und nützlicher sein, wenn wir ihre Funktionalität vollständig verstehen und ihrer Hardware vertrauen können. Außerdem sind wir überzeugt, dass zukünftige Robotik/KI-Systeme für die Menschheit allgemein förderlich sein werden, wenn die zugrundeliegende Technologie unabhängig von privaten Interessen und in den Händen von Wissenschaftlern, Ingenieuren und Hackern weltweit ist.
Bei der Entwicklung von Laufrobotern ist die notwendige Hardware oft nicht erschwinglich, oder die Quellen für die Hardware-Designs oder die Software schwer zugänglich. Einen Laufroboter von Grund auf zu entwickeln kann leicht mehrere Jahre dauern, was für Forscher und Hobbyisten viel Aufwand bedeutet und für Startups ein hohes Risiko darstellt.
Wir entwickeln ein völlig freies quelloffenes Hardware- und Software-Design für einen Laufroboter, welches von allen verwendet, studiert, modifiziert und verteilt werden kann, und wollen damit einen Beitrag zur Demokratisierung des Bereichs der Laufroboter leisten. Das mechanische Design besteht aus 3D-gedruckten oder Laser-geschnitten Teilen, welche anderweitig zu teuer wären, bzw. aus Standardteilen, welche vielerorts günstig erworben werden können. Der Roboter kann somit leicht im lokalen Hackspace oder zu Hause nachgebaut werden. Das Motorsteuerungssystem ist eine ebenfalls quelloffene Elektronik- und Firmware-Eigenentwicklung zur einfachen Regelung von DC-Motoren inklusive eines flexiblen Bussystems zur Echtzeitkommunikation. Die Software umfasst die Low-Level Motorregelung und die Algorithmen zur Bewegungssteuerung für verschiedene Gangarten und Richtungen, welche durch Mikroprozessor-freundliche neuronale Regler erzeugt werden.
Info
Day:
2018-12-28
Start time:
17:30
Duration:
01:00
Room:
Eliza
Track:
Hardware & Making
Language:
de
Links:
Files
{kind=link}
{kind=link}
Feedback
Click here to let us know how you liked this event.
Concurrent Events
Speakers
 |
Matthias Kubisch |
 |
Felix Just |